 and Power ports labeled." width="3324" height="1584" />
and Power ports labeled." width="3324" height="1584" />Many of the components of the FRC® Control System have indicator lights that can be used to quickly diagnose problems with your robot. This guide shows each of the hardware components and describes the meaning of the indicators. Photos and information from Innovation FIRST and Cross the Road Electronics.
A compact and printable Status Light Quick Reference is available.
Robot On and Disabled
Robot On and Enabled
Robot Off, roboRIO not powered or RSL not wired properly
Power
Brownout protection tripped, outputs disabled
Power fault, check user rails for short circuit
Status
On while the controller is booting, then should turn off
Software error, reimage roboRIO
Safe Mode, restart roboRIO, reimage if not resolved
Software crashed twice without rebooting, reboot roboRIO, reimage if not resolved
Constant flash or stays solid on
Radio
Not currently implemented
Comm
Communication with DS, but no user code running
Good communications with DS
Mode
Outputs disabled (robot in Disabled, brown-out, etc.)
RSL
and Power ports labeled." width="3324" height="1584" />
On or Powering up
Bridge mode, Unlinked or non-FRC firmware
Bridge mode, Linked
No Fault - Robot Enabled
No Fault - Robot Disabled
If a PDP LED is showing more than one color, see the PDP LED special states table below. For more information on resolving PDP faults see the PDP User Manual.
Note that the No CAN Comm fault will occur if the PDP cannot communicate with the roboRIO via CAN Bus.
No Power/ Incorrect Polarity
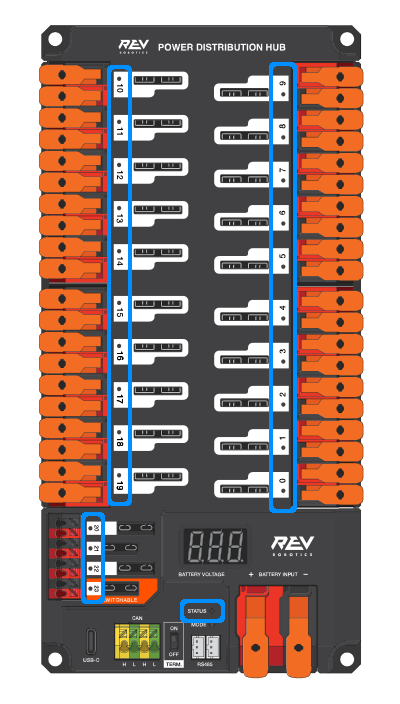
These led patterns only apply to firmware version 21.1.7 and later
Device on but no communication established
Main Communication with roboRIO established
Keep Alive Timeout
Secondary Heartbeat (Connected to REV Hardware Client)
Device Over Current
Channel has voltage and is operating as expected
Channel has NO voltage and there is an active fault. Check for tripped or missing circuit breaker / fuse
Sticky fault on the channel. Check for tripped circuit breaker / fuse.
The status LEDs on the VRM indicate the state of the two power supplies. If the supply is functioning properly the LED should be lit bright green. If the LED is not lit or is dim, the output may be shorted or drawing too much current.
No Fault Robot Enabled
No CAN Comm or Solenoid Fault (Blinks Solenoid Index)
If a PCM LED is showing more than one color, see the PCM LED special states table below. For more information on resolving PCM faults see the PCM User Manual.
Note that the No CAN Comm fault will not occur only if the device cannot communicate with any other device, if the PCM and PDP can communicate with each other, but not the roboRIO.
No Power/Incorrect Polarity
This is the Compressor LED. This LED is green when the compressor output is active (compressor is currently on) and off when the compressor output is not active.
These LEDs are lit red if the Solenoid channel is enabled and not lit if it is disabled.
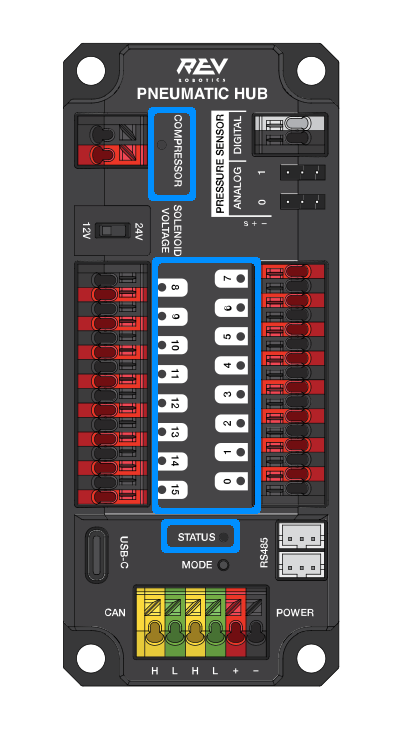
These led patterns only apply to firmware version 21.1.7 and later
Device on but no communication established
Main Communication established
Keep Alive Timeout
Secondary Heartbeat (connected to REV HW Client)
Device Over Current

Talon SRX State
Forward throttle is applied. Blink rate is proportional to Duty Cycle.
Reverse throttle is applied. Blink rate is proportional to Duty Cycle.
No power is being applied to Talon SRX
CAN bus detected, robot disabled
CAN bus/PWM is not detected
LEDs Strobe towards (M-)
Forward Limit Switch or Forward Soft Limit
LEDs Strobe towards (M+)
Reverse Limit Switch or Reverse Soft Limit
LED1 Only (closest to M+/V+)
LEDs Strobe towards (M+)
Thermal Fault / Shutoff (Talon FX Only)
Status LEDs Blink Code
Talon SRX State
B/C CAL Button Color
Talon SRX State



Brake/Coast/Cal Button/LED - Red if the controller is in brake mode, off if the controller is in coast mode
Full forward output
Proportional to forward output voltage
Full reverse output
Proportional to forward output voltage
FRC robot disabled, PWM signal lost, or signal in deadband range (+/- 4% output)
Ready for calibration. Several green flashes indicates successful calibration, and red several times indicates unsuccessful calibration.

Full forward output
Proportional to forward output voltage
Full reverse output
Proportional to reverse output voltage
No CAN devices are connected
Disabled state, PWM signal lost, FRC robot disabled, or signal in deadband range (+/- 4% output)
No input power to Talon
Ready for calibration. Several green flashes indicates successful calibration, and red several times indicates unsuccessful calibration.
Full forward output
Full reverse output

Normal Operating Conditions
Neutral (speed set to 0)
Fast Flashing Green
Fast Flashing Red
Slow Flashing Yellow
Loss of servo or Network link
Fast Flashing Yellow
Slow Flashing Red
Voltage, Temperature, or Limit Switch fault condition
Slow Flashing Red and Yellow
Current fault condition
Calibration or CAN Conditions
Flashing Red and Green
Calibration mode active
Flashing Red and Yellow
Calibration mode failure
Flashing Green and Yellow
Calibration mode success
Slow Flashing Green
CAN ID assignment mode
Fast Flashing Yellow
Current CAN ID (count flashes to determine ID)
CAN ID invalid (that is, Set to 0) awaiting valid ID assignment
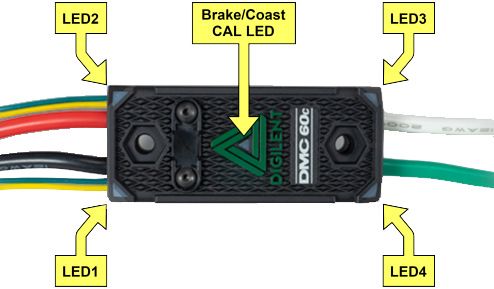
The DMC60C contains four RGB (Red, Green, and Blue) LEDs and one Brake/Coast CAL LED. The four RGB LEDs are located in the corners and are used to indicate status during normal operation, as well as when a fault occurs. The Brake/Coast CAL LED is located in the center of the triangle, which is located at the center of the housing, and is used to indicate the current Brake/Coast setting. When the center LED is off, the device is operating in coast mode. When the center LED is illuminated, the device is operating in brake mode. The Brake/Coast mode can be toggled by pressing down on the center of the triangle, and then releasing the button.
At power-on, the RGB LEDs illuminate Blue, continually getting brighter. This lasts for approximately five seconds. During this time, the motor controller will not respond to an input signal, nor will the output drivers be enabled. After the initial power-on has completed, the device begins normal operation and what gets displayed on the RGB LEDs is a function of the input signal being applied, as well as the current fault state. Assuming that no faults have occurred, the RGB LEDs function as follows:
PWM Signal Applied
No Input Signal or Invalid Input Pulse Width
Alternate between top (LED1 and LED2) and bottom (LED3 and LED4) LEDs being illuminated Red and Off.
Neutral Input Pulse Width
All 4 LEDs illuminated Orange.
Positive Input Pulse Width
LEDs blink Green in a clockwise circular pattern (LED1 → LED2 → LED3 → LED4 → LED1). The LED update rate is proportional to the duty cycle of the output and increases with increased duty cycle. At 100% duty cycle, all 4 LEDs are illuminated Green.
Negative Input Pulse Width
LEDs blink Red in a counter-clockwise circular pattern (LED1 → LED4 → LED3 → LED2 → LED1). The LED update rate is proportional to the duty cycle of the output and increases with increased duty cycle. At 100% duty cycle, all 4 LEDs are illuminated Red.
CAN Bus Control State
No Input Signal or CAN bus error detected
Alternate between top (LED1 and LED2) and bottom (LED3 and LED4) LEDs being illuminated Red and Off.
No CAN Control Frame received within the last 100ms or the last control frame specified modeNoDrive (Output Disabled)
Alternate between top (LED1 and LED2) and bottom (LED3 and LED4) LEDs being illuminated Orange and Off.
Valid CAN Control Frame received within the last 100ms. The specified control mode resulted in a Neutral Duty Cycle being applied to Motor Output
All 4 LEDs illuminated solid Orange.
Valid CAN Control Frame received within the last 100ms. The specified control mode resulted in a Positive Duty Cycle being Motor Output
LEDs blink Green in a clockwise circular pattern (LED1 → LED2 → LED3 → LED4 → LED1). The LED update rate is proportional to the duty cycle of the output and increases with increased duty cycle. At 100% duty cycle, all 4 LEDs are illuminated Green.
Valid CAN Control Frame received within the last 100ms. The specified control mode resulted in a Negative Duty Cycle being Motor Output
LEDs blink Red in a counter-clockwise circular pattern (LED1 → LED4 → LED3 → LED2 → LED1). The LED update rate is proportional to the duty cycle of the output and increases with increased duty cycle. At 100% duty cycle, all 4 LEDs are illuminated Red.
When a fault condition is detected, the output duty cycle is reduced to 0% and a fault is signaled. The output then remains disabled for 3 seconds. During this time the onboard LEDs (LED1-4) are used to indicate the fault condition. The fault condition is indicated by toggling between the top (LED1 and LED2) and bottom (LED3 and LED4) LEDs being illuminated Red and off. The color of the bottom LEDs depends on which faults are presently active. The table below describes how the color of the bottom LEDs maps to the presently active faults.